Views
Tutorial:PhysicsCollisionCallbacks
Contents |
Preface
If you do not have a good grasp on love.physics, you should first check out this physics tutorial.
In this tutorial we will create a collision between two objects that calls certain callbacks set by World:setCallbacks.
Tutorial
main.lua setup
Let's start by setting up main.lua with 3 love functions: love.load, love.update, and love.draw
end
function love.update(dt)
end
function love.draw()
end
World setup
Now that we have a framework setup, let's setup a physics world in love.load with newWorld. We will also use World:update.
--Store the new world in a variable such as "world"
world = love.physics.newWorld(0, 200, true) --Gravity is being set to 0 in the x direction and 200 in the y direction.
end
function love.update(dt)
--Never forget to update your world every frame.
world:update(dt)
end
Now we want to create a ball and a ground. To do this we will need newBody, newCircleShape, and newRectangleShape. We'll connect the bodies to the shapes using newFixture.
... -- don't include this, it's just indicating where the existing code for the function should be
ball = {}
ball.b = love.physics.newBody(world, 400,200, "dynamic") -- set x,y position (400,200) and let it move and hit other objects ("dynamic")
ball.b:setMass(10) -- make it pretty light
ball.s = love.physics.newCircleShape(50) -- give it a radius of 50
ball.f = love.physics.newFixture(ball.b, ball.s) -- connect body to shape
ball.f:setRestitution(0.4) -- make it bouncy
ball.f:setUserData("Ball") -- give it a name, which we'll access later
static = {}
static.b = love.physics.newBody(world, 400,400, "static") -- "static" makes it not move
static.s = love.physics.newRectangleShape(200,50) -- set size to 200,50 (x,y)
static.f = love.physics.newFixture(static.b, static.s)
static.f:setUserData("Block")
end
The objects are there now, but you can't yet see them. Let's draw them.
love.graphics.circle("line", ball.b:getX(),ball.b:getY(), ball.s:getRadius(), 20)
love.graphics.polygon("line", static.b:getWorldPoints(static.s:getPoints()))
end
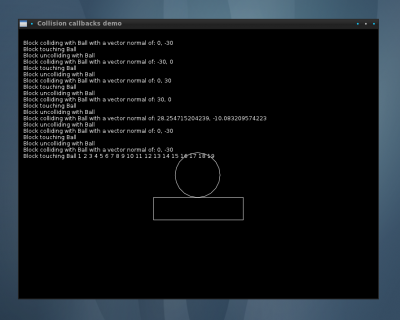
Now we should see a ball fall down and hit a solid rectangle.
World Callbacks
But what if we want more information on the two objects colliding? Now we will use World:setCallbacks to further dissect their collision(s).
First thing we do is set the world callbacks with World:setCallbacks. There are four callbacks for a collision: beginContact, endContact, preSolve, and postSolve.
- beginContact gets called when two fixtures start overlapping (two objects collide).
- endContact gets called when two fixtures stop overlapping (two objects disconnect).
- preSolve is called just before a frame is resolved for a current collision
- postSolve is called just after a frame is resolved for a current collision.
... -- substitute for the rest of love.load
world = love.physics.newWorld(0, 200, true)
--These callback function names can be almost any you want:
world:setCallbacks(beginContact, endContact, preSolve, postSolve)
text = "" -- we'll use this to put info text on the screen later
persisting = 0 -- we'll use this to store the state of repeated callback calls
Now define each function you just named.
end
function endContact(a, b, coll)
end
function preSolve(a, b, coll)
end
function postSolve(a, b, coll, normalimpulse1, tangentimpulse1, normalimpulse2, tangentimpulse2)
end
These functions are called every time one of the collision actions happen. They pass in two fixtures and a collision object. The postsolve callback also contains the normal and tangent impulse for each collision contact point. These parameters can also be named to whatever you want. In this tutorial, we choose a, b, and coll.
- a is the first fixture object in the collision.
- b is the second fixture object in the collision.
- coll is the contact object created.
- normalimpulse1 is the amount of impulse applied along the normal of the first point of collision. It only applies to the postsolve callback, and we can ignore it for now.
- tangentimpulse1 is the amount of impulse applied along the tangent of the first point of collision. It only applies to the postsolve callback, and we can ignore it for now.
Say we want to print to screen whenever a callback is called. We just need to modify the text variable we added to love.load() earlier by appending a string every time a collision action happens. We need a bit of extra code to keep the output clean too.
A list of functions you can use on contacts can be found at the Contact page.
... -- substitute for the rest of love.update
if string.len(text) > 768 then -- cleanup when 'text' gets too long
text = ""
end
end
function love.draw()
... -- substitute for the rest of love.draw
love.graphics.print(text, 10, 10)
end
function beginContact(a, b, coll)
x,y = coll:getNormal()
text = text.."\n"..a:getUserData().." colliding with "..b:getUserData().." with a vector normal of: "..x..", "..y
end
function endContact(a, b, coll)
persisting = 0 -- reset since they're no longer touching
text = text.."\n"..a:getUserData().." uncolliding with "..b:getUserData()
end
function preSolve(a, b, coll)
if persisting == 0 then -- only say when they first start touching
text = text.."\n"..a:getUserData().." touching "..b:getUserData()
elseif persisting < 20 then -- then just start counting
text = text.." "..persisting
end
persisting = persisting + 1 -- keep track of how many updates they've been touching for
end
function postSolve(a, b, coll, normalimpulse1, tangentimpulse1, normalimpulse2, tangentimpulse2)
-- we won't do anything with this function
end
And now you know how to use world callbacks!
To better explore how this world behaves and see when the callbacks are invoked, add some controls to allow you to push around the ball:
world:update(dt)
if love.keyboard.isDown("right") then
ball.b:applyForce(1000, 0)
elseif love.keyboard.isDown("left") then
ball.b:applyForce(-1000, 0)
end
if love.keyboard.isDown("up") then
ball.b:applyForce(0, -5000)
elseif love.keyboard.isDown("down") then
ball.b:applyForce(0, 1000)
end
if string.len(text) > 768 then -- cleanup when 'text' gets too long
text = ""
end
end
Finished
Screenshots
main.lua
world = love.physics.newWorld(0, 200, true)
world:setCallbacks(beginContact, endContact, preSolve, postSolve)
ball = {}
ball.b = love.physics.newBody(world, 400,200, "dynamic")
ball.b:setMass(10)
ball.s = love.physics.newCircleShape(50)
ball.f = love.physics.newFixture(ball.b, ball.s)
ball.f:setRestitution(0.4) -- make it bouncy
ball.f:setUserData("Ball")
static = {}
static.b = love.physics.newBody(world, 400,400, "static")
static.s = love.physics.newRectangleShape(200,50)
static.f = love.physics.newFixture(static.b, static.s)
static.f:setUserData("Block")
text = "" -- we'll use this to put info text on the screen later
persisting = 0 -- we'll use this to store the state of repeated callback calls
end
function love.update(dt)
world:update(dt)
if love.keyboard.isDown("right") then
ball.b:applyForce(1000, 0)
elseif love.keyboard.isDown("left") then
ball.b:applyForce(-1000, 0)
end
if love.keyboard.isDown("up") then
ball.b:applyForce(0, -5000)
elseif love.keyboard.isDown("down") then
ball.b:applyForce(0, 1000)
end
if string.len(text) > 768 then -- cleanup when 'text' gets too long
text = ""
end
end
function love.draw()
love.graphics.circle("line", ball.b:getX(),ball.b:getY(), ball.s:getRadius(), 20)
love.graphics.polygon("line", static.b:getWorldPoints(static.s:getPoints()))
love.graphics.print(text, 10, 10)
end
function beginContact(a, b, coll)
x,y = coll:getNormal()
text = text.."\n"..a:getUserData().." colliding with "..b:getUserData().." with a vector normal of: "..x..", "..y
end
function endContact(a, b, coll)
persisting = 0
text = text.."\n"..a:getUserData().." uncolliding with "..b:getUserData()
end
function preSolve(a, b, coll)
if persisting == 0 then -- only say when they first start touching
text = text.."\n"..a:getUserData().." touching "..b:getUserData()
elseif persisting < 20 then -- then just start counting
text = text.." "..persisting
end
persisting = persisting + 1 -- keep track of how many updates they've been touching for
end
function postSolve(a, b, coll, normalimpulse1, tangentimpulse1, normalimpulse2, tangentimpulse2)
end
Other languages
Dansk –
Deutsch –
English –
Español –
Français –
Indonesia –
Italiano –
Lietuviškai –
Magyar –
Nederlands –
Polski –
Português –
Română –
Slovenský –
Suomi –
Svenska –
Türkçe –
Česky –
Ελληνικά –
Български –
Русский –
Српски –
Українська –
עברית –
ไทย –
日本語 –
正體中文 –
简体中文 –
Tiếng Việt –
한국어
More info